In this study, compressing image data to 20 Mbps had minimal impact on telesurgical operability and image quality. The security devices detected simulated communication attacks as abnormal traffic while correctly identifying the communication data essential for robotic operation as normal. The installation of these security devices did not cause any image distortion or interference with robot functionality. The additional communication delay introduced by the security equipment was at most 2 ms, indicating that its presence had no adverse effect on telesurgical performance. However, it was considered important to evaluate the impact of security equipment on overall bandwidth requirements.
Ebihara Y et al. reported that teleoperation systems using the hinotori™ robot require communication bandwidths of at least 150 Mbps for optimal performance. When the available bandwidth is insufficient, image compression has been shown to be an effective method to avoid degradation in image quality [5]. In the pursuit of economically practical communication lines, one viable approach is to reduce transmission traffic by avoiding the need to transmit full, uncompressed data. Since image data constitutes the majority of transmitted information in telesurgery, Takahashi investigated the extent to which image compression can be applied without compromising surgical performance. Their study found that even with compression down to 10 Mbps, there was no negative impact on surgery in a telesurgical environment [14]. In this study, the surgeons’ cockpit and operation unit were physically connected via a communication line between two geographically remote cities. It was confirmed that the transmission image data could be effectively compressed, and that telesurgical performance was not adversely affected even at a bitrate of 20 Mbps. This is largely attributable to the use of optimized compression techniques, including selectively reducing image data in the peripheral regions of the display rather than applying uniform compression, as well as decreasing the amount of color information within the image.
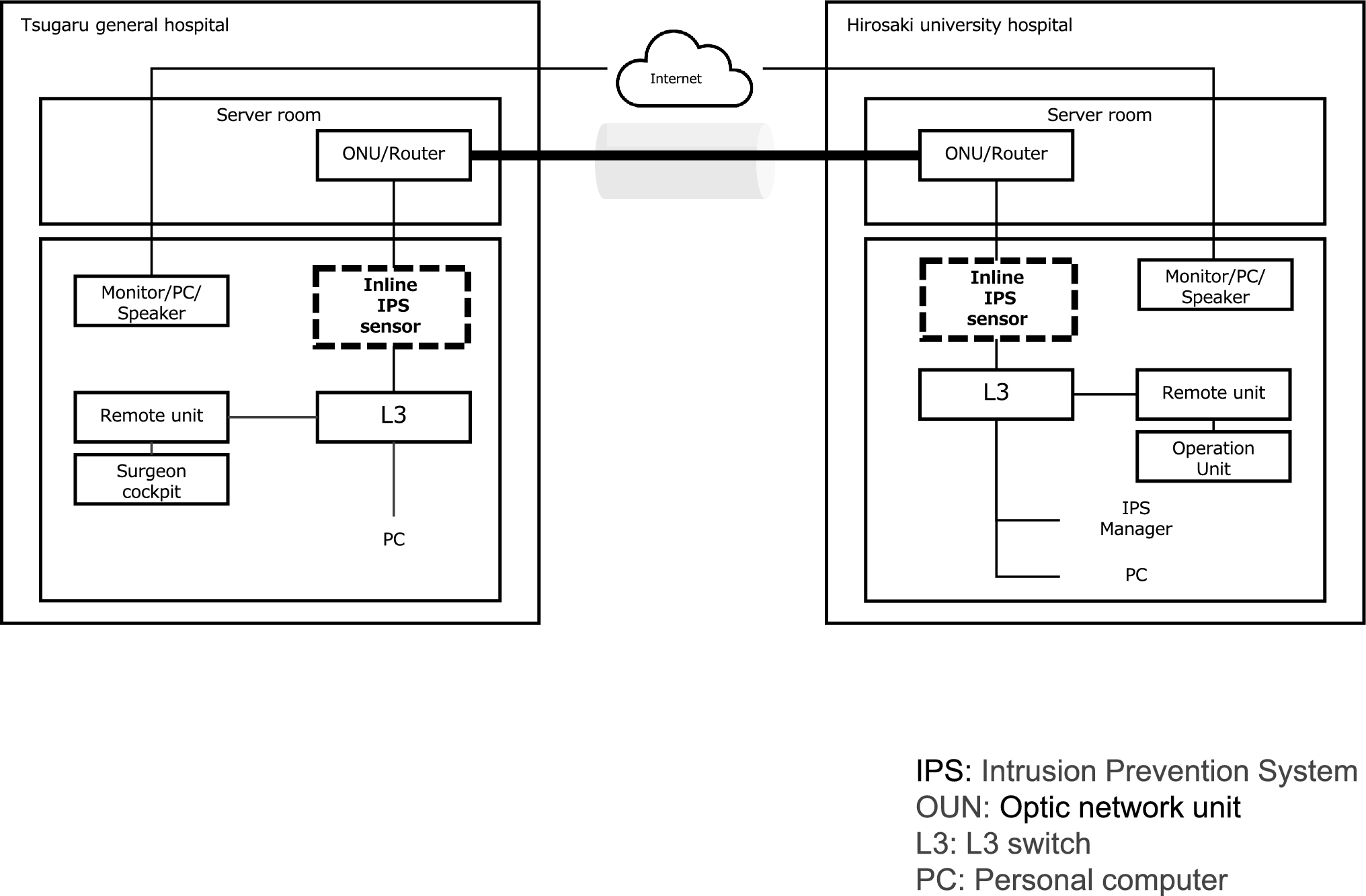
Telesurgery has advanced remarkably over the past two decades, driven by major developments in surgical assistive robotics and communication technologies [15]. However, alongside its clinical potential, serious concerns have emerged regarding cybersecurity and the reliability of communication networks [16]. Telesurgery systems are vulnerable to a range of cyber threats, including eavesdropping, sabotage, data tampering, and unauthorized access. Ensuring the confidentiality, integrity, and availability of data is essential, as patient information and surgical commands are transmitted and received in real time [13]. Because cyberattacks and communication failures during telesurgery can compromise patient safety, the establishment of robust security measures is essential. In this study, the Intrusion Prevention System (IPS) used for verification consisted of a sensor and a manager unit. The sensor was installed at Tsugaru General Hospital, while the manager was located at Hirosaki University Hospital.
The verification involved two configurations: an inline type, which handles a high volume of communication traffic, and a mirror port type, which monitors a lighter load. Port scanning tests were conducted using the mirror port configuration. When inline IPsec was deployed in areas where unauthorized communications could potentially be monitored nearby, simulated cyberattacks were introduced to observe the effects. These tests revealed no delays or communication interruptions that would interfere with telesurgical operations.
Verification of system performance with IPsec encryption between dual surgeon cockpits demonstrated that the change in communication bandwidth was approximately 5 Mbps, with no increase in latency. No difference in error packet rates was observed with or without security devices. Although the inability to detect robot-specific communication packets in this study represents a major concern, addressing this issue with general-purpose security devices is made challenging by trade secret constraints regarding robot-specific communication protocols. Therefore, the development of security solutions tailored to each robotic system will likely become necessary. Communication protocols used in telesurgery must meet stringent requirements, including low latency, high reliability, and strong encryption. To safeguard telesurgery systems from unauthorized access, it is essential to implement real-time cybersecurity monitoring, anomaly detection, and the rapid identification of attack indicators.
The Japanese Telesurgery Guidelines recommend the use of closed communication networks: physically or logically isolated from the Internet, and the application of encryption between communication terminals when performing telesurgical procedures. These measures are intended to enhance both the security and reliability of telesurgical systems [17]. However, as the adoption of telesurgery expands, it is anticipated that a variety of connection types, including open networks both within and between facilities, will be utilized. This shift introduces new challenges for implementing institutions, particularly regarding organizational frameworks and the need for technical safeguards such as external connection management.
To ensure secure implementation, it is essential to categorize necessary security measures based on several criteria: inter-facility connectivity, maintenance and management connectivity, the physical and digital infrastructure of the facility, and the use of cloud-based services. While closed communication networks are generally considered more resilient against external cyber threats, it remains crucial to establish comprehensive security protocols, especially in light of the potential future use of open or hybrid communication networks that may not rely on closed lines.
In today’s environment of escalating cyberattacks, it is essential to prepare for both known and unknown threats. There is a pressing need to integrate cutting-edge cybersecurity technologies into the medical field, particularly in areas such as telesurgery. From the patient’s perspective, the absence of a surgeon at their bedside, combined with fears of data breaches or hacking, may lead to skepticism or mistrust toward telemedicine technologies overall. To address these concerns, a multifaceted approach is required. This should include the transparent disclosure of expert-led security assessments, the widespread dissemination of official guidelines, and public awareness initiatives aimed at building trust and understanding of the safety and reliability of remote medical technologies. Ensuring security in telesurgery is not solely a technical challenge, it is a multidisciplinary issue that spans engineering, medicine, law, and ethics [18]. Moreover, non-technical factors such as infrastructure investment by telecommunication carriers, regional disparities in network availability, and disaster resiliency pose barriers to achieving secure telecommunication for telesurgery. Therefore, national-level support for the development and strengthening of telecommunication infrastructure is essential.
This study has several limitations. First, statistical validation was not feasible because of the small number of participants assigned to each communication line type. Moreover, some variables could not be fully assessed because of measurement constraints. It was anticipated that network performance might be affected by internal communication pathways within the hospital, such as routers and intermediary devices; however, a detailed investigation of these factors was not possible. The VLANs of the surgical support robot and the malware-infected PC were configured on separate network segments, which may have prevented accurate detection of certain communication abnormalities. Furthermore, since an actual operating room was used for the study, there were limitations regarding the availability of the operating room and study location. Finally, a detailed economic analysis of the communication infrastructure was not conducted due to scope and time constraints. Communication costs are variable depending on social circumstances and corporate philosophy, making it difficult to specify specific amounts in this paper.
In conclusion, this study demonstrated that IPS-based security enhancement is an effective approach for the social implementation of telesurgery, as it enables the detection of anomalous communications without compromising the safety or performance of telesurgical operations. Additionally, the feasibility of selecting cost-effective communication lines through image compression was confirmed. Looking ahead, it will be essential to establish a sustainable operational model for remote robotic surgery, which integrates legal frameworks, medical ethics, and ongoing technological innovation. Achieving this goal will require strategic and coordinated efforts through collaboration among industry, government, academia, and the medical community.



Comments (0)