In this exploratory work we examined the object selection preferences and grip types used during multiple object handling with pairs of familiar objects. Participants were presented with the object pairs and grasped them in an order of their choosing. We calculated the frequency each object was grasped first and how this was related to object mass and surface area. We also coded typical (finger-thumb opposition) and atypical grip types and examined how these were distributed within and between three stages of the action (Object 1 lift, Object 1 hold, Object 2 lift). We visualised grip choice within object pairs for a descriptive analysis. Results indicated that finger-thumb opposition was the most prevalent grip type for lifting objects, whilst a range of atypical grips were used for holding Object 1. In addition, object mass or surface area were correlated with selection order, such that smaller objects were more often selected first. Below we discuss these results in more detail, consider the use of atypical grips in motor control, address limitations of our study, and propose potential areas for future research.
A possible common approach to multiple object handling
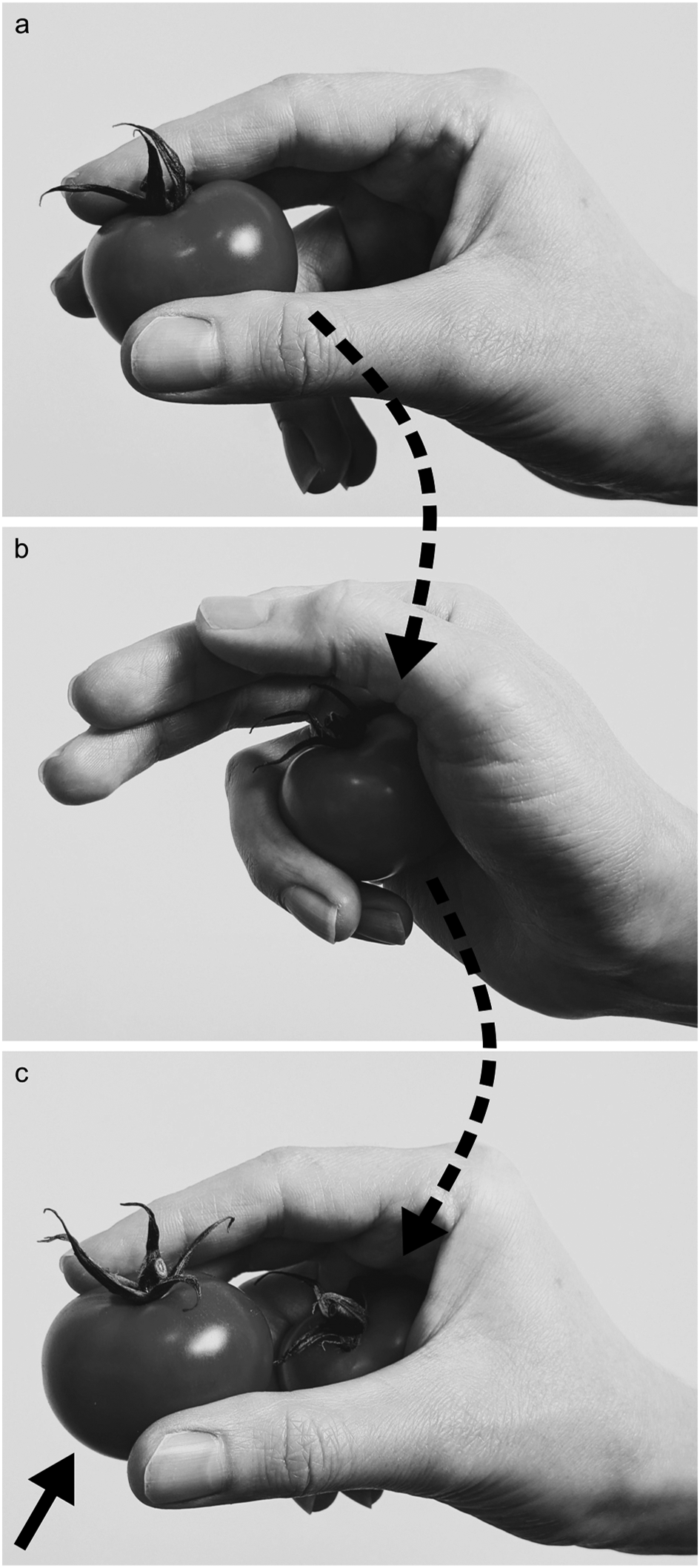
The pattern of grip types used within and between stages provides preliminary evidence for an overarching approach to multiple object handling (at least for situations involving two objects). Specifically, we observed that when two objects are grasped cumulatively, finger-thumb opposition is almost always used to grasp the first object (as is typically observed for single-object interactions). The first object is then held within the hand, frequently using an atypical grip. This is probably to ensure that finger-thumb opposition can be used again for grasping a second object, where this grip type is once again the most common. Importantly, this general strategy was clearly evident when examining the specific object-order combinations that occurred in at least half of participants.
Post hoc analysis indicated a negative correlation between the mass or surface area of each object and the percentage of trials in which it was selected first. Given the general strategy described above, it is plausible that individuals select an object that is lighter or with lower surface area first to increase the ease of holding this object during the second grasp and subsequent transport. Whilst the correlations should be considered with some caution given the low number of datapoints, this explanation is highly feasible given that it is much easier to grasp a large (heavy) object when a small (light) object is already in the hand than vice versa. Interestingly, we did find that there was some preference for participants to select the object closest to them to grasp first. However, this is unsurprising given that half of the objects had a mass below 10 g (table tennis ball, pencil, dice, key, nut, needle), three between 30 and 80 g (deodorant, tennis ball, rolling pin), and three greater than 100 g (glass, plate, book). Given the strategy described above it is likely that when objects of similar mass (or size) are paired one can select them in either order (and so participants grasp the nearest object first).
Our results highlight the fact that multiple object handling is a dexterous motor skill that is both conservative and flexible. It is conservative in that finger-thumb opposition appears to be prioritised for grasping where possible, maintaining this effective approach to grip objects in a secure manner. This is particularly evident when examining the lifting of the first object, where participants almost never used an atypical grip. Multiple object handling is also flexible in that it elicits a range of atypical grips to hold, and occasionally grasp, objects. Indeed, atypical grips were occasionally used to lift a second object, deviating from the common approach described above. One particularly notable example was the glass, in which finger-finger opposition was occasionally used (Supplementary Material, Fig. S2). That the hollow structure of a drinking glass promotes lifting between the fingers is unsurprising given that this is a highly familiar action. However, as visualised in Fig. S2, preferences for lifting using an atypical grip are also linked to a (limited) variety of other objects and object combinations. It will now be beneficial to move beyond purely descriptive visualisation and develop a deeper understanding of how different objects (and their properties) interact to elicit certain grip types.
Atypical grips in multiple object handling
In highlighting the use of atypical grips in multiple object handling, the present work extends our understanding of the capacity of the human hand for dexterous motor control. We observed that participants were able to effectively manipulate the first object within the hand and then hold it securely using one of a range of atypical grips, thus facilitating cumulative object grasping and subsequent transport. As far as we are aware, these atypical grips are not yet captured in grasp taxonomies that focus on single object interactions (although, of course, they are more commonly used for holding than grasping in the present work). Notably, atypical grip choice may be linked to object size in much the same way that typical power and precision grips are (Castiello 2005). In addition to this, object properties and action stage also appear to interact to influence grip choice, in a way that is unique to multiple object handling. For example, some objects (tennis ball, rolling pin, table tennis ball) were commonly held between the fingers and the palm after grasping when they were selected as the first object (Fig. 4). Conversely, objects with the smallest mass or lowest surface area (pencil, dice, key, nut, needle) were frequently held after grasping using the Other grip category, which involved a variety of potential grips (e.g., fingers opposing themselves in a ‘hooked’ posture). As mentioned above, these results are purely descriptive, but they do allow the visualisation of patterns across the stimulus set and facilitate the creation of new research questions regarding object shape and size that will be beneficial to evaluate in future work (for example, whether there is an object size at which finger-palm opposition becomes preferred for holding).
Unfortunately, when developing the coding scheme, we did not appreciate the extent to which the Other category would be used in the full dataset. In fact, we observed several atypical grip types in the full sample that were suitable for the Other category but not seen in the participants with which the coding scheme was developed. Our present results are therefore lacking a fine-grained evaluation of the range of grips falling into this category. Further study will be necessary to evaluate the prevalence of the different grips captured in the Other category (e.g., thumb-palm opposition, use of the palmar creases) and how they might be linked to object properties. Indeed, in addition to widening the categorisation of atypical grip, more work will be necessary to further understand other aspects of multiple object handling (see below).
Limitations
We must consider potential limitations of our study and caveats to the interpretation of results provided above. As a preliminary investigation into multiple object handling, we sought to study it in a semi-naturalistic fashion by using familiar objects which, if grasped individually, afforded an extensive variety of potential finger-thumb opposition grips (thus accounting for established variability in the grip types that occur in typical, everyday object grasping). Consequently, the properties of the objects were not distributed in a controlled manner. Given that object order preference was closely related to object mass or surface area, these features formed the basis for interpreting our results. Whilst all objects differed in other properties (e.g., shape, texture), these were not evaluated in our analysis. Further work using custom experimental stimuli, such that object properties and their combinations are controlled and evenly distributed, would allow one to more comprehensively examine the links between action stage, grip type, and object properties.
In addition to focussing on familiar objects, we also decided against testing participants on all possible object combinations, given the extended experiment duration this would have entailed. Furthermore, to evaluate object selection preferences, we allowed participants to choose the order in which they grasped objects. As stated in the method section, these two factors mean that the percentage use of each grip type was associated with different object pairs for each participant. For example, some participants could have grasped the key as Object 1 and the dice as Object 2, some may have grasped these objects in the opposite order, and others may not have been presented with this combination at all. As such, the distribution of grips can vary due to participants interacting with different objects, and not because they used different grips for a matched set of objects. Regardless, the prevalence of finger-thumb opposition during Object 1 and Object 2 lift is likely to reflect an invariant approach that is not confined to a specific object (and this was supported by multinomial analyses of three participant subsamples with matched object-order combinations).
One notable constraint of our work is the lack of a formally validated coding scheme. Whilst there was a high level of agreement between the first coder and the subsequent verification by another author, coding was not performed in a truly independent manner (i.e., with two or more raters coding the same behaviour individually and then calculating inter-rater reliability). Although we are confident that the overarching strategy we describe cannot be explained by biased coding (i.e., through erroneously coding atypical grips as finger-thumb opposition), ensuring the reliability of coding should be a priority in future research on multiple object handling. Another potential limitation is the absence of detailed participant information. For example, we did not collect relevant data to allow us to exclude participants who had a motor disorder or expertise in a dexterous skill (e.g., instrument playing, sports). These factors may have reduced or improved participant ability in completing the experimental task. However, we did not observe that any participant had specific difficulties completing the task that would indicate problems with dexterous motor control. We also do not consider enhanced manual dexterity a particular concern, since we consider it unlikely that prioritising finger-thumb opposition (the grip type normally used for grasping single objects) would be a strategy used only by those with enhanced manual dexterity. One could argue that individual differences in manual dexterity might explain grip type outliers (Fig. 3b). However, these are also plausibly explained by the unique object pairs those participants interacted with. Future examination of individual differences in multiple object handling might help us understand whether this efficient method for object transport is negatively impacted by certain clinical disorders and whether (and why) some individuals might be more skilled in this behaviour than others.
A final limitation is the potential for experimenter bias in guiding participant responses. That is, since participants were provided with a demonstration by the experimenters and were able to observe them manipulate objects between trials it is possible that this could explain the prevalence of the general approach to multiple object handling proposed above. Whilst we cannot fully exclude this possibility, we consider it unlikely. Participants were only ever provided a formal demonstration with the first object pair (one of 66 possible combinations). We did not control for the strategy used during demonstration or experimenter behaviour between trials, but we made it clear to participants that they could complete the task in whichever manner they saw fit, as long as they did not let the first object touch the table after lifting it or use one object to carry another.
Ultimately, given that participants had no problem using a wide variety of different grips in the Object 1 hold stage, we think it is unlikely that they would have chosen to mainly use finger-thumb opposition for grasping Object 1 and Object 2 solely due to experimenter guidance if there was an alternative strategy that they found easier. The overarching approach to multiple object handling described above was incredibly consistent across participants (regardless of the different object pairs they interacted with) and is highly plausible a priori: it is clearly evident if one engages in multiple object handling that finger-thumb opposition is an effective way to grasp at least the first object. In any case, the current work provides a basis for further examination of multiple object handling in a more controlled manner to verify the results reported here.
Future research
The current work provides a first step towards a deeper understanding of multiple object handling, and so there is considerable potential for further research in addition to that mentioned above. It is worth emphasising that whilst the preferential use of finger-thumb opposition for grasping and atypical grips for holding is likely reflected in naturalistic behaviour, the distribution of grip types we observed within each stage is unlikely to be indicative of their prevalence of use outside of a laboratory environment (and our study was not designed to evaluate this). Rather, the present results are more informative regarding the types of grip that can be used during multiple object handling, and how the grips used might vary between stages (particularly when one grip type, finger-thumb opposition, is highly skewed). Similarly, given that the objects used in this experiment were chosen primarily for their capacity to elicit varied (finger-thumb opposition) grips, their properties may not necessarily reflect those of objects people naturally choose to transport through multiple object handling. Recording freely-acting participants as they complete their daily activities would reveal more about grip prevalence, the scenarios in which certain grips occur, and the objects that are typically involved in multiple object handling (Bullock et al. 2013; Ingram et al. 2008; Nakamura et al. 2017).
It would also be beneficial to examine multiple object handling with more than two objects (either in a laboratory or naturalistic environment), since we are not limited to this number in our daily activities. We assume that the general approach described above would remain, with finger-thumb opposition being prioritised for each grasp and each prior object commonly held using an atypical grip. Naturally, this will become more challenging with each additional object as the capacity of the hand is reduced and the cumulative object property interactions become more complex. Additionally, it is well-established that the kinematics of reaching and grasping are influenced by object properties and grip (e.g., Castiello et al. 1993; Gentilucci et al. 1991; Marteniuk et al. 1990). Examining the kinematics of multiple object handling would extend our understanding of how such actions are planned and performed. For example, by showing how the spatial and temporal features of the reach-to-grasp action change depending on the requirement for a subsequent grasp and the grip used for holding.
Further study of multiple object handling is likely to have benefits beyond developing our understanding of human motor control. Specifically, such investigation may be informative for the design of advanced robotics. The study of human hand control has long been influential on robotics development, but robots cannot yet fully replicate the dexterity of the hand (Billard and Kragic 2019). Some researchers have begun to develop robots that can engage in multiple object handling in a human-like fashion (Yao and Billard 2023), but there has been a stronger focus on the grasping of multiple objects simultaneously rather than cumulatively (Li et al. 2024; Sun et al. 2022). This skill, which has been referred to as ‘multi-object grasping’ (Sun et al. 2022), is also commonly used by humans for efficient object transport (e.g., in cases where one might want to grasp several small items of food from a bowl at once). However, it is distinct from multiple object handling and poses its own unique challenges (both for the human sensorimotor system and robots).
Conclusion
To conclude, the present work provides insight into the strategies used for multiple object handling, a common skill for transporting several objects simultaneously. Results suggest that the overarching approach to this task is to use finger-thumb opposition where possible, alongside a variety of atypical grips to facilitate the holding of a previously grasped object. These findings provide the basis for further research into this unique motor skill and contribute to our broader understanding of human manual dexterity.






Comments (0)