In this work, we introduced the Maestro, a novel robotic platform with AI support, and assessed its safety and feasibility to perform solo elective general surgery procedures, where the surgeon operates alone at the bedside. We found the MIS platform was both safe and feasible. In 45 simple and complex procedures performed by multiple surgeons at multiple centers, there were no intraoperative complications, no need for conversion or including a bedside assistant, no major postoperative complications, readmissions, or reoperations, and no device-related issues.
In current laparoscopic and robotic surgery, bedside assistance remains critical for tasks such as retraction and camera control. However, reliance on human assistance introduces variability, cost, and occasional inefficiencies, all of which can adversely affect procedural flow and outcomes. Transitioning to solo surgery, when appropriate, holds significant promise for enhancing surgeon autonomy, optimizing workflows, and improving care delivery, particularly in settings with limited personnel. The concept of solo surgery is not new, and even though it has already been described with platforms such as AESOP, Vicky, FIPS Endoarm, and SoloAssist, its adoption has not been widespread [14,15,16,17,18]. Use has remained limited due to the restricted clinical value of technologies that control only one instrument, without enabling coordinated management of both visualization and exposure. Technical challenges, safety concerns, surgeon discomfort, prolonged operative times, and reliability issues have also hindered adoption. However, the need for a platform that improves surgeon autonomy and surgical workflows remains.
The introduction of Maestro marks a significant advancement in this area. Unlike traditional laparoscopic setups where assistants statically manage retractors and the camera—often leading to suboptimal exposure and increased operative time—Maestro enables dynamic, responsive control and visualization [19]. In robotic surgery with telemanipulators, although the surgeon is console-based, an assistant is still required at the bedside [20]. In contrast, Maestro eliminates the need for a master–slave interface and allows experienced surgeons to independently maintain exposure and visualization.
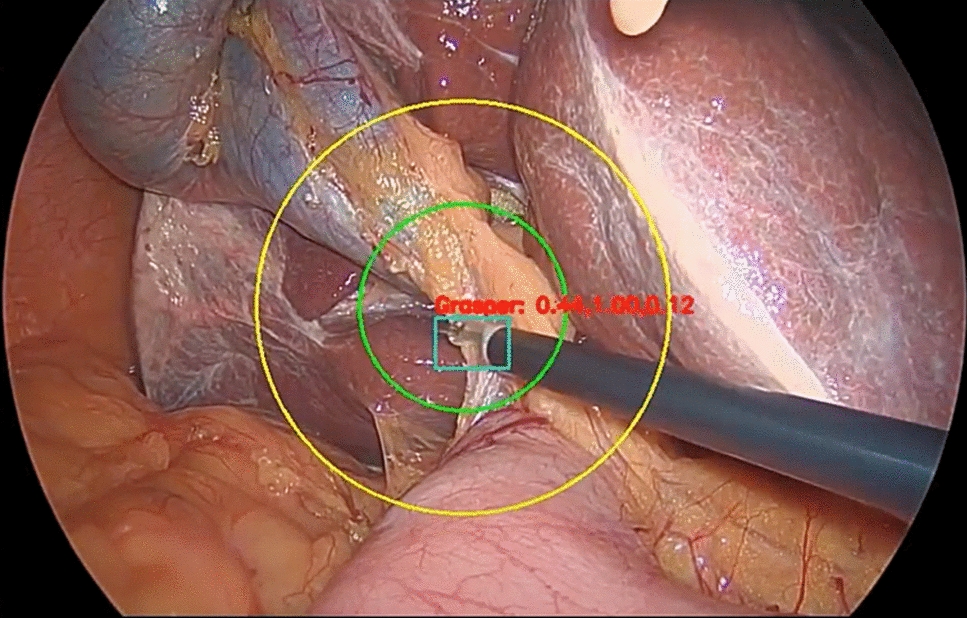
This study demonstrates that Maestro delivers stable retraction, consistent visualization, and operative outcomes on par with standard MIS, all without the need for bedside assistance. The platform incorporates an embedded GPU and physical AI capabilities, making it the first surgical assistant with real-time, autonomous interaction with the operative field. Currently, its AI module (ScoPilot) is programmed to track key instruments such as the monopolar hook and grasper, with development underway to expand to other tools and enhance computer vision capabilities. By leveraging advanced computer vision algorithms, Maestro processes real-time laparoscopic video to track instruments and guide robotic arms accordingly. These groundbreaking capabilities toward AI interacting with the physical world could revolutionize instrument handling, advanced visualization, enhanced instrumentation, intraoperative data analysis, kinematics, surgical education, and workflow improvements in various surgical contexts [21]. The resulting gains in camera stability and tissue retraction could not only improve surgical precision but may also contribute to a more ergonomic and satisfying experience for the operating surgeon. Studies are in progress to quantify these improvements.
While solo surgery is an exciting advance, the introduction of the Maestro robotic system presents both opportunities and challenges for surgical training. On the positive side, Maestro allows a single surgeon to maintain stable visualization and instrument control without reliance on an assistant, which may improve operative efficiency and ergonomics while reducing variability introduced by less-experienced trainees. This enhanced autonomy could serve as a valuable model of surgical independence for residents, highlighting the American Board of Surgery’s framework for entrustable professional activities,, learning workflow optimization and reducing reliance on bedside assistance [22]. However, there are also potential negatives. By automating or supplanting traditional assistant roles such as retraction, suction, or camera control, the Maestro system may inadvertently reduce residents’ opportunities for hands-on participation in core technical tasks [23, 24]. Exclusion from these roles risks limiting their graduated responsibility and could delay the acquisition of critical operative judgment and independence. Furthermore, without structured incorporation of residents into solo-surgery cases, there is a danger of creating a two-tiered environment in which staff surgeons gain proficiency with the system while trainees are relegated to observation, ultimately hindering their preparedness for independent practice [25, 26]. Thus, while Maestro offers ergonomic and workflow advantages, deliberate strategies will be needed to ensure residents have opportunities to operate with the platform themselves and to preserve the principles of progressive autonomy if used in surgical education.
We acknowledge the limitations of this work. This was an uncontrolled study based on prospectively collected data, which may introduce bias. Nonetheless, this design was appropriate for an initial safety and feasibility assessment and provides the foundation for future controlled trials. Additionally, while the multi-center, multi-surgeon nature of the study could introduce variability, it also increases the generalizability and real-world relevance of the findings. Although the sample size of 45 cases may appear modest, it was sufficient to establish the primary outcomes of safety and feasibility, justifying progression to larger-scale evaluations.
Regardless of any limitations, this study contributes meaningfully to the MIS literature. The Maestro system exemplifies the shift toward increased surgical autonomy and the potential for solo surgical procedures. In well-resourced settings, its use could allow assistants and nursing staff to focus on higher-value intraoperative tasks beyond static instrument holding, potentially enhancing team efficiency, impacting surgical workflows and patient care quality. In resource-limited environments, Maestro could address critical staffing shortages by enabling safe and effective solo surgery, further expanding MIS applications in these settings. The system’s digital enhancements offer a glimpse into a future where a broader range of procedures can be performed autonomously. Surgeons will play a key role in shaping the evolution of AI-integrated surgery and collaborating with other stakeholders to ensure maximum safety and quality of this evolving paradigm [27].
In conclusion, this study establishes that solo MIS using the Maestro platform is both safe and feasible across a range of abdominal procedures following the IDEAL framework.
The system demonstrated low intraoperative or device-related errors (safety), and low conversion rates or need for bedside assistance (feasibility), with excellent postoperative outcomes and surgeon satisfaction. As the first AI-enabled surgical assistant capable of physical interaction with the operative field, Maestro represents a decisive step toward autonomous surgical care. Ongoing studies will further evaluate its clinical impact, with the goal of improving patient outcomes, surgeon satisfaction, and operating room efficiency.




Comments (0)